KernalMind
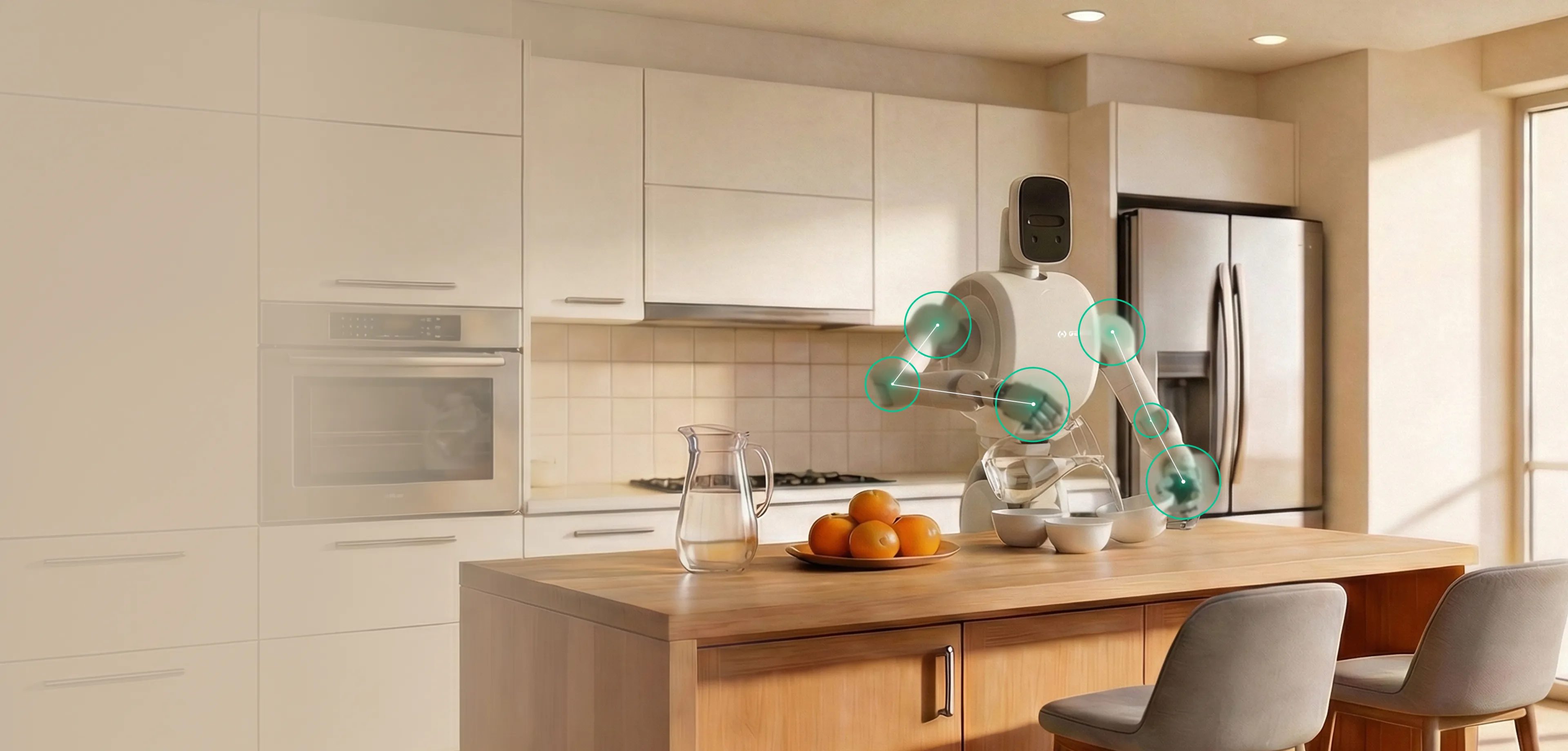
KernalMind 赋予机器人在现实世界中的感知、推理与行动能力。
依托统一的 VLA(视觉-语言-行动)框架,它将多模态数据转化为可执行的 3D 世界理解,实现数据驱动的学习以及在真实家庭环境中的可靠执行。
基于强大的数据流水线,我们的系统以“感知-推理-行动”为核心闭环,全面提升机器人在开放环境中的泛化能力与任务成功率。
-

数据采集与处理平台
KernalMind 构建了完整的数据采集与处理流水线,以支持具身智能的模型训练与迭代。
多源数据采集
整合 Apex 数据采集与第一视角(EGO)数据采集。
集中式数据流水线
实现跨本体数据的统一处理、标注与结构化组织。
数据驱动的学习
基于真实及采集的数据,执行跨本体与小样本策略学习。
该系统为模型提供了高质量的训练数据基础,使其能够在真实场景中实现快速学习并增强泛化能力。
-

行动学习与执行模块
KernalMind 通过其“行动学习与策略推理模块”实现从感知到执行的闭环。
- 策略推理:将 VLM 生成的任务指令转化为可执行的动作。
- 动作专家模块:为特定任务生成定制化的动作策略。
- 重定向映射:通过 FabriX-Retargeting 实现跨本体的动作迁移。
该模块与“小脑模型”协同工作,使机器人能够在任何硬件平台上复用已学习的技能。
-

KernalMind —— Apex 遥操作系统
用于机器人数据采集与技能学习的遥操作平台,提供高质量的示教数据:
- 远程遥操作与第一视角(EGO)数据采集
- 通过重定向(Retargeting)集成实现人-机器人动作映射
- 模型训练的关键数据流水线入口
- 与中央数据系统协同实现跨本体学习与策略优化
该平台简化了“遥操作 → 数据 → 处理 → 训练”的闭环流程,是具身智能的核心支柱之一。
-
系统集成与部署
KernalMind 的算法优先平台支持端到端的机器人系统集成:
- 面向 Marvin 机器人平台(MX-0 架构)的模型部署
- 与感知、控制及数据模块的系统级集成
- 多本体适配与扩展
凭借软硬件协同,该平台将具身智能落地于真实部署场景。
技术